首页 > 全部产品 > 硬件 > 智能硬件 > AMTI Force Plates|高精度三维测力台系统
AMTI Force Plates|高精度三维测力台系统

|
|||||
|---|---|---|---|---|---|
|
 |
 |
 |
 |
|
-
高精度测量三轴地面反作用力(Fx、Fy、Fz)与力矩数据
广泛应用于运动生物力学、步态分析与人体运动研究
支持跳跃、落地、平衡、跑步与康复训练等动态评估
可与 Motive、Visual3D、MATLAB 等平台同步集成
支持 OptiTrack、Noraxon、EMG 与动作捕捉系统联合分析
提供便携式与实验室级多种型号,适用于科研与临床环境
支持 C3D、CSV 与实时数据流输出,满足高级运动分析需求
产品型号
| 产品名称 | 型号 | 货期 | 单价 |
|---|---|---|---|
| AMTI | 请联系我们 | 请联系我们 | 请联系我们 |

产品说明
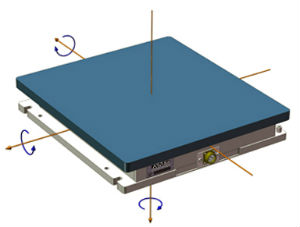
AMTI Force Plates 是由 AMTI(Advanced Mechanical Technology, Inc.) 推出的高精度地面反作用力(GRF)测量平台,广泛应用于运动生物力学、步态分析、康复医学、人体工学、运动科学及科研教学等领域。系统可实时测量人体运动过程中产生的多轴力、力矩以及压力中心(COP)变化,用于深入分析跳跃、落地、步态、平衡、力量输出与运动控制机制。
目前,AMTI 测力台已可与 Noraxon MR Software、OptiTrack Motive、Visual3D、MATLAB 等平台进行同步集成,实现运动捕捉、EMG、压力、惯性传感器与动力学数据的统一采集分析。
产品特点
高精度多轴力学测量
AMTI 测力台支持同步采集:
Fx / Fy / Fz 三轴地面反作用力
Mx / My / Mz 三轴力矩
Center of Pressure(COP,压力中心)
动态平衡与负载变化
适用于:
步态分析(Gait Analysis)
跳跃与落地研究
跑步与运动表现评估
姿态稳定性研究
康复训练评估
人体工学研究
多系统同步能力
AMTI Force Plates 可通过:
USB 数字接口
Gen5 / Optima 放大器
eSync 2 同步器
NI-DAQ 数据采集系统
与以下系统实现同步:
OptiTrack 光学动作捕捉
Noraxon EMG 系统
Delsys EMG
MATLAB
Visual3D
MotionMonitor
支持运动学(Kinematics)与动力学(Kinetics)同步分析。
支持 OptiTrack Motive 集成
根据 OptiTrack 官方文档,AMTI 测力台可与 Prime 系列摄像机和 eSync 2 实现高精度同步。
支持功能包括:
Force Vector 实时显示
力平台空间校准
C3D 导出
CSV 导出
NatNet 数据流
Live Mode 实时同步
Visual3D 数据兼容
支持的放大器型号:
AMTI Gen5 Amplifier
AMTI Optima Amplifier
典型应用场景
运动科学
跑步动力学
起跳与落地分析
爆发力研究
运动表现评估
康复与临床
平衡能力评估
神经康复训练
下肢功能恢复
步态异常分析
科研与高校
生物力学研究
人体运动建模
力学数据采集实验
多模态同步研究
人体工学
工作姿态分析
负载评估
工业动作优化
请随时与我们联系,了解更多关于产品的信息、介绍前的流程、价格和报价细节。我们的团队将为您提供专业的建议和支持,确保您能够根据您的需求选择最合适的方案。如果您有任何疑问或需要个性化的服务,欢迎通过电话或电子邮件与我们联系,我们将尽快回复并为您提供所需的帮助。