首页 > 全部产品 > 硬件 > 智能硬件 > XELA Roboticsu Skin|触觉传感机器人
XELA Roboticsu Skin|触觉传感机器人

|
|||||
|---|---|---|---|---|---|
|
 |
 |
 |
 |
|
-
基于触觉感知(Tactile Sensing)的机器人智能交互平台
通过 uSkin 传感器实现压力与剪切力实时检测
支持机器人夹爪、仿生机械手及复杂曲面集成
搭配 uAi 软件实现触觉数据可视化与接触分析
可用于易碎物体抓取、柔性装配与精密操作任务
适用于自动化、物流、服务机器人与科研领域
源自早稻田大学技术体系的人形机器人触觉方案
产品型号
| 产品名称 | 型号 | 货期 | 单价 |
|---|---|---|---|
| XELA uSkin 触觉传感器(夹爪版) | uSkin Gripper Series | 请联系我们 | 请联系我们 |
| XELA uSkin 触觉传感器(机械手版) | uSkin Robot Hand Series | 请联系我们 | 请联系我们 |

产品说明
XELA Robotics 是一家专注于机器人触觉感知(Tactile Sensing)的科技公司,致力于为机器人赋予“人类般的触觉能力”。其核心理念为:
“Physical AI with a Human Touch”
XELA 的系统主要由:
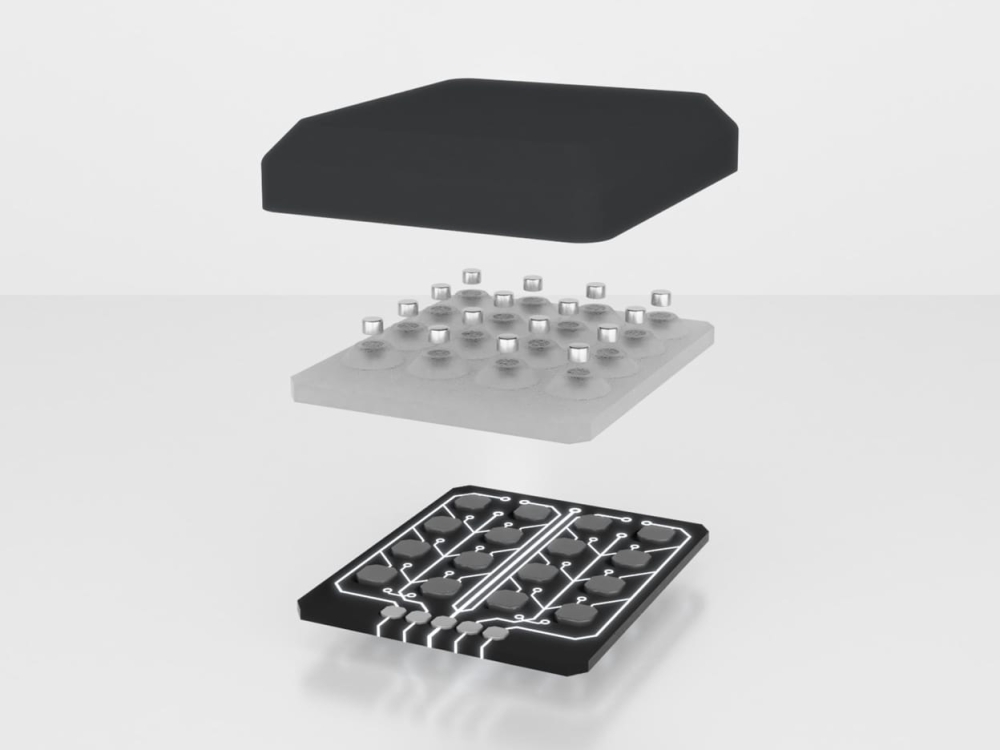
uSkin 触觉传感器
uAi 触觉分析软件
两部分构成,可帮助机器人感知接触压力、滑动、剪切力与接触位置,实现更稳定、更智能的操作能力。
核心技术特点
1. 多维触觉感知
uSkin 每个感测单元可同时检测:
法向压力(Normal Force)
剪切力(Shear Force)
接触位置
滑移状态
相比传统力传感器,可实现更接近人类皮肤的接触反馈。
2. 面向机器人夹爪优化
适用于:
工业夹爪
协作机器人
柔性抓取系统
自动化上下料
能够显著提升:
抓取稳定性
防滑能力
易碎物搬运能力
不规则物体处理能力
3. 支持仿生机械手
XELA 触觉系统可用于:
多指灵巧手
人形机器人
服务机器人
医疗机器人
帮助机器人实现:
力控制
精细抓握
动态接触调整
类人操作反馈
4. 任意表面集成
uSkin 可部署于:
机械臂表面
机器人手掌
指尖区域
非平面结构
适用于复杂曲面与定制化机器人平台。
5. uAi 软件平台
uAi 提供:
触觉数据可视化
实时接触点检测
数据记录
力分布分析
触觉 AI 数据处理
适合:
AI 训练
机器人研究
人机交互开发
触觉数据集构建
典型应用领域
工业自动化
精密装配
柔性制造
半导体搬运
电子元件抓取
物流与仓储
自动分拣
易碎品搬运
不规则包裹抓取
服务机器人
人机交互
家庭辅助
商业服务机器人
科研与教育
机器人实验室
AI 触觉研究
强化学习
Human-Robot Interaction(HRI)
系统组成
uSkin Sensors
包括:
Gripper 用触觉传感器
Robot Hand 用触觉模块
Surface 用触觉阵列
uAi Software
提供:
数据采集
可视化分析
接触检测
实时处理接口
技术优势
高灵敏度触觉检测
同时检测压力与剪切力
支持实时高速数据处理
可扩展机器人平台
支持 AI 与机器学习训练
面向 Physical AI 场景设计
支持复杂动态接触环境
请随时与我们联系,了解更多关于产品的信息、介绍前的流程、价格和报价细节。我们的团队将为您提供专业的建议和支持,确保您能够根据您的需求选择最合适的方案。如果您有任何疑问或需要个性化的服务,欢迎通过电话或电子邮件与我们联系,我们将尽快回复并为您提供所需的帮助。